Este artículo apareció originalmente en la edición del 1 de febrero de 2020 de la revista Good Fruit Grower: A robot’s rules for pruning

Prototipo de un sistema de visión de poda robótica en desarrollo en el Centro de Sistemas Agrícolas Automatizados y de Precisión de la Universidad Estatal de Washington en Prosser. Un sistema de visión computarizado crea un mapa espacial de la arquitectura de un árbol, casi en tiempo real, luego analiza esa información para tomar decisiones sobre dónde hacer cortes de poda. Este prototipo utiliza un modelo de tijeras de poda de madera para fines de prueba. (TJ Mullinax/Good Fruit Grower fotos e ilustraciones)
Cuando lleguen los robots de huertos, sería un desperdicio de tecnología si solo manipularan la cosecha.
Una vez que tenga un vehículo autónomo adaptado para huertos, equipado con sensores de análisis del dosel y computadoras de aprendizaje automático, los productores deberían poder usarlo durante toda la temporada al cambiar la herramienta en el extremo de un brazo robótico. Una cuchilla para la poda de invierno se cambia por hilos para el raleo en la floración y luego por un recogedor de fruta para la cosecha.
Al menos, esa es la visión según el profesor de ingeniería biológica de la Universidad Estatal de Washington, Manoj Karkee, quien participa en diversos proyectos de investigación de robótica de huertos. Incluyen una colaboración de poda robótica con la Universidad Estatal de Oregón y la Universidad Carnegie Mellon que se basa en el mismo marco tecnológico que sirve de base para la cosecha robótica.
“Estamos desarrollando sistemas de visión para comprender el dosel”, dijo. “Al entender los doseles, cuál es su geometría, toda esa información será muy útil en aplicaciones como la formación y la poda”.
No es el primer paso de la industria en la poda automatizada.
Un proyecto financiado por una subvención federal de 2011 a 2014, dirigido por la Universidad de Purdue y la Universidad Estatal de Pensilvania, dio como resultado un protocolo matemático favorable al uso de robots en la toma de decisiones sobre la poda, pero no generó robots comerciales.
Amy Tabb, ingeniera agrónoma de la Estación de Investigación de Frutas Appalachian del Departamento de Agricultura de los Estados Unidos en Virginia Occidental, también ha desarrollado programas de visión computarizada para el análisis de la arquitectura de árboles. Ella dijo que presenta un desafío sorprendentemente difícil para que la visión por computadora pueda ver y recrear árboles en tercera dimensión, y aún más que los robots puedan maniobrar en doseles en tres dimensiones.
“El problema de percepción es mucho más fácil en el dosel bidimensional” que con los sistemas de eje alto, Tall Spindle, en los que estaba trabajando, afirmó. “O bien su sistema va a ser lento o debe cambiar el dosel”.
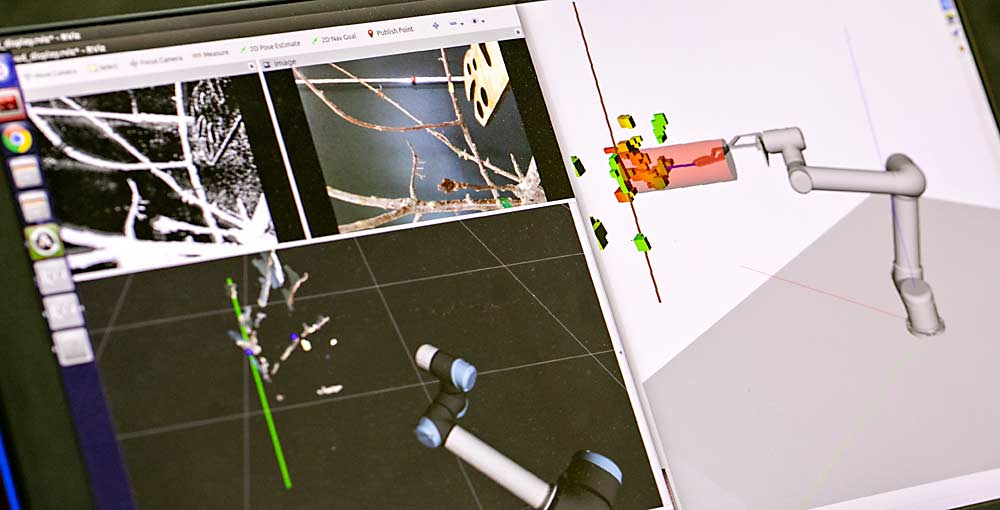
Esto es lo que Uddhav Bhattarai ve en el monitor de la computadora de un prototipo del sistema de visión de poda robótica. La pantalla muestra varios tipos de información en vivo desde las cámaras y sensores del robot, incluida la arquitectura del árbol y el robot en el espacio 3D. (TJ Mullinax/Good Fruit Grower)
Cree el dosel que los robots necesitan
La nueva colaboración WSU-OSU-CMU, financiada por la Comisión de Investigación de Árboles Frutales de Washington, tiene la ventaja de trabajar en más huertos bidimensionales.
“Por eso nos gusta trabajar en huertos y viñedos con paredes de fructificación”, dijo George Kantor, profesor de robótica de Carnegie Mellon. Él y el científico del proyecto Abhi Silwal, quien obtuvo su doctorado en WSU, trabajando con Karkee, han desarrollado sistemas robustos de cámaras para analizar el dosel en condiciones de luz variable.
Silwal dijo que la poda robótica en realidad puede darles a los huertos una estructura más consistente y uniforme que encaja a la perfección con la cosecha mecanizada.
Trabajaron con el grupo de Karkee para grabar el trabajo de las personas que están podando, para ver si las máquinas podían aprender el arte de la poda de las personas.
“Descubrimos que en realidad realmente no son constantes en términos de seguir las reglas de poda”, dijo Silwal. “No tienen tiempo para medir con precisión qué son 6 pulgadas (15 centímetros), lo calculan. Y eso varía del podador uno al podador dos”.
La IA, por otro lado, mide diámetros y distancias y cuenta los brotes antes de tomar todas y cada una de las decisiones, casi en tiempo real.
“Podemos optimizar las localizaciones de los puntos de corte para que, en la temporada de crecimiento, las manzanas se coloquen en ubicaciones más o menos igualmente espaciadas”, dijo Silwal.
Los algoritmos pueden hacer eso, pero luego el equipo necesita demostrar que una podadora mecánica en un brazo robótico, en desarrollo por el laboratorio de Joe Davidson en OSU, es capaz de convertir ese análisis en una acción efectiva y eficiente.
Construcción de bloques robóticos
El campo de la robótica de los huertos parece moverse lentamente, desde la perspectiva de los productores que esperan herramientas comercializadas, pero en realidad se ha logrado un gran progreso en la formación de bloques que deben unirse para resolver las complejas necesidades de la automatización de los huertos, dijo Kantor en su plática en la reunión anual de la Asociación de Árboles Frutales del Estado de Washington en diciembre.
“Hay tres funciones fundamentales: movilidad, visión e interacción”, dijo Kantor. El trabajo exitoso de un robot en un huerto requiere los tres campos de ingeniería.
La movilidad autónoma está aquí, dijo, aunque las empresas todavía están descubriendo cómo venderla a los productores de manera útil. La tecnología de visión por computadora también ha avanzado mucho, debido a los métodos avanzados de aprendizaje automático.
“En la actualidad, si logras ver algo en una imagen, podemos enseñarle a una computadora para que lo haga”, dijo. “Entonces, podemos conducir y ver cosas, y hay mucho valor en conducir y ver cosas, pero en algún momento, queremos hacer algo”.
Los ingenieros llaman a hacer algo de manipulación, y es la parte más difícil porque requiere primero la otra tecnología y porque requiere un equipamiento mecánico complejo que lleva tiempo construir, probar y mejorar, dijo Kantor, y añadió que cierta manipulación, como la poda, podría ser más fácil que el Santo Grial de la cosecha.

Los estudiantes graduados de la Universidad Estatal de Washington, Uddhav Bhattarai, derecha, y Santosh Bhusal, organizaron una demostración del prototipo del sistema de visión de poda robótica de Bhattarai que incluye varias cámaras, software y una armadura robótica industrial. Un equipo de investigadores de la WSU, la Universidad Estatal de Oregón y la Universidad Carnegie Mellon está trabajando en aspectos relacionados con la prueba de concepto de un sistema de poda robótica y esperan hacer los primeros experimentos de campo este invierno. (TJ Mullinax/Good Fruit Grower)
¿El huevo o la gallina?
Si la poda robótica plantea un problema de ingeniería más fácil que la cosecha de manzanas, o un problema más complicado, depende del colaborador al que se le pregunte.
Desde una perspectiva de IA, la poda es más compleja, dijo Karkee, porque el sistema necesita generar una estructura tridimensional completa de cada árbol, incluido el diámetro de cada rama, para decidir qué ramas eliminar.
“Tenemos que tomar decisiones a nivel del dosel o de los árboles, en lugar de poder recoger manzanas una por una en la cosecha”, dijo. Además, es mucho más fácil detectar manzanas grandes, rojas y redondas. “Para la poda latente, tenemos objetos que no están bien coloreados, con diámetros más pequeños, por lo que necesitamos una mayor resolución y capacidades computacionales más altas”.
Pero desde la perspectiva de la manipulación robótica, la poda presenta menos desafíos, dijeron Kantor y Silwal.
“Cuando recoges manzanas, tienes que ir muy rápido y debes ser perfecto, porque la fruta se daña fácilmente”, dijo Kantor. “No tienes que preocuparte por los daños durante la poda”.
Además, hay un periodo de tiempo más largo para realizar la poda latente, por lo que es posible que los robots no necesiten trabajar tan rápido como durante la cosecha, dijo Silwal.
Este invierno marca el primer intento de reunir todas las piezas de la investigación: visión por computadora, análisis y brazo robótico, pero enfatizan que todavía es una prueba de concepto. Hacer que la tecnología se vuelva viable para los productores dependerá de la efectividad que puedan alcanzar y del costo para hacerlo, dijeron Kantor y Karkee.
“Los robots todavía no están allí, aún no son comercialmente viables, pero la información se puede utilizar para hacer que la agricultura sea más eficiente”, dijo Karkee. “A largo plazo, todo esto encaja bastante bien en el desarrollo de sistemas agrícolas inteligentes”.
Apoyo al desarrollo de la tecnología
Muchos productores dudan en comprar tecnología o contratar servicios de nuevas empresas no probadas. Eso es comprensible, pero la empresa emergente que intenta comercializar una nueva herramienta marca una de las etapas más críticas en el desarrollo de la tecnología agrícola.

George Kantor
“Las startups o nuevas empresas son una buena manera de llevar la tecnología de una universidad a usted”, dijo George Kantor, científico senior en sistemas del Instituto de Robótica de la Universidad Carnegie Mellon. Él habló sobre la tecnología emergente para la industria de los árboles frutales en la Reunión Anual de la Asociación de Árboles Frutales del Estado de Washington en diciembre y alentó a los productores a apoyar nuevas herramientas.
Indicó que la comercialización tiene mucho trabajo invisible para adoptar algo que funciona bien en un estudio universitario y hacerlo exitoso en un sistema comercial. Existe un gran riesgo en esa fase, pero una vez que una tecnología atrae a los clientes y demuestra su valía, las empresas más grandes pueden adquirir la tecnología y ampliarla. Citó el ejemplo de John Deere con la compra reciente de una startup que pasó cinco años desarrollando la tecnología “Ve y pulveriza” (“See & Spray”, en su nombre en inglés) para la aplicación selectiva automatizada de herbicidas.
Los primeros clientes que se arriesgan con las nuevas tecnologías ayudan a esas empresas a atraer a los inversionistas necesarios para ampliar las operaciones.
“Cuando te conviertes en cliente de una de estas compañías emergentes, el valor de esos 10,000 USD es un voto tuyo”, dijo Kantor. “Estás invirtiendo en una capacidad que podría no llegar a ser viable sin esa inversión”.
—por Kate Prengaman